












业务流程模型与符号(BPMN)提供了一种标准化的方式来可视化工作流。然而,视觉上的清晰并不保证执行的正确性。流程建模中的一个常见陷阱是创建一个死锁。当流程实例进入一个无法继续前进的状态,但工作流尚未完成时,就会发生这种情况。理解流程控制、网关和同步机制对于构建稳健的系统至关重要。
🧠 理解流程死锁
BPMN图中的死锁表示令牌被卡住的状态。在执行引擎中,令牌代表流程中的控制流。当令牌进入图的某个区域,但由于缺少条件或未满足依赖关系而无法继续前进时,流程将无限期停止。这种情况通常被称为活锁或一个阻塞状态.
为什么这很重要?停滞的流程会影响运营效率和用户体验。如果客户订单在支付验证循环中卡住,收入将被延迟。如果员工入职流程冻结,招聘时间表将受到影响。防止这些状态需要深入理解引擎如何解释序列流。
死锁的关键特征
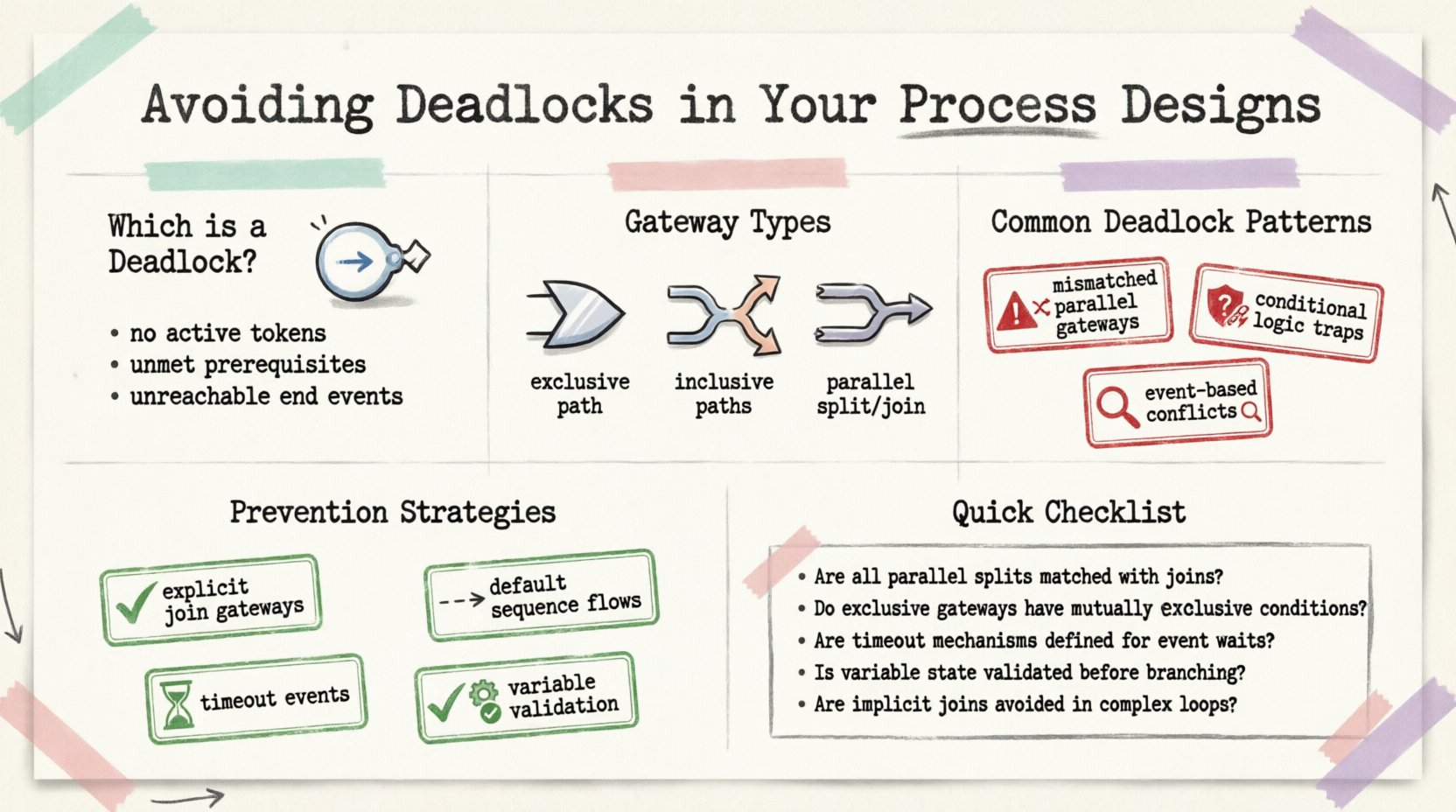
- 无活动令牌: 流程引擎停止等待永远不会到达的输入。
- 未满足的前提条件: 网关需要来自多个路径的令牌,但其中一条路径被阻塞。
- 无法到达的结束事件: 流程无法到达其终止点。
- 状态一致性: 条件逻辑所需的变量未定义或为空。
🚦 网关的机制
网关是BPMN中的决策点。它们控制令牌在图中的流动方式。错误配置这些元素是导致死锁的主要原因。有三种与流程同步相关的网关类型:
- XOR网关: 排他性选择。根据条件,仅选择一条输出路径。
- OR网关: 包含性选择。可以选取一条或多条输出路径。
- AND网关: 并行拆分与合并。所有输出路径都必须完成后才能继续。
死锁经常发生在AND网关 当拆分和合并逻辑不匹配时。例如,如果并行拆分创建了两条路径,则两条路径都必须到达后续的合并网关以释放令牌。如果其中一条路径过早结束或错误地循环返回,令牌将无限期等待。
⚠️ 导致死锁的常见模式
识别潜在风险模式有助于建模人员在部署前纠正设计。以下场景是阻塞状态的常见原因。
1. 并行网关不匹配
当您使用 AND 网关将流程拆分为并行任务时,会创建多个令牌。要将这些路径重新合并为单一流程,需要一个对应的 AND 网关。如果使用 XOR 网关来合并并行路径,引擎期望只有一个令牌到达。如果另一个令牌仍在处理中,XOR 网关将无限期等待,从而导致死锁。
2. 条件逻辑陷阱
出站序列流上的条件表达式决定了选择哪条路径。如果所有出站路径的条件都评估为假,令牌将无处可去。例如,如果某条路径检查 status == 'approved' 或 status == 'rejected',但 status == 'pending',流程将停止。
3. 基于事件的网关冲突
基于事件的网关允许流程在继续之前等待特定事件的发生。如果配置了多个事件,第一个发生的事件将触发相应路径。然而,如果这些事件互斥且在合理时间内均未发生,流程将一直等待。如果没有超时机制,这将导致死锁。
📊 网关行为对比
理解网关的具体行为对于避免同步错误至关重要。下表说明了不同网关如何处理传入和传出的令牌。
| 网关类型 | 拆分行为(输出) | 合并行为(输入) | 死锁风险 |
|---|---|---|---|
| AND(并行) | 为所有路径创建令牌 | 需要所有令牌到达 | 路径不平衡时风险较高 |
| XOR(互斥) | 为一条路径创建一个令牌 | 接受一个令牌 | 条件失败时风险中等 |
| OR(包含) | 为匹配的路径创建令牌 | 需要所有活动路径都到达 | 如果未跟踪活动路径,则为高 |
| 基于事件 | 等待事件发生 | 在第一个事件发生时触发 | 无超时情况下为高 |
🛡️ 预防策略
一旦你理解了机制,就可以应用特定策略来防止死锁。这些技术的重点是确保每条路径都有明确的出口,并且同步是显式的。
1. 显式汇聚网关
始终确保每个分支都有对应的汇聚。如果你将流程拆分为两个并行任务,请确认两个任务在继续之前都汇聚到一个AND网关。除非引擎支持隐式汇聚(这种情况很少见),否则不要允许并行路径在没有网关的情况下直接合并。
2. 默认序列流
在XOR网关上使用默认序列流。默认流是指在没有其他条件满足时所采取的路径。这起到了安全网的作用。如果令牌到达网关且所有特定条件都不成立,则它将遵循默认路径。这可以防止令牌消失在虚无中。
3. 超时事件
对于等待外部输入的流程,应实现定时器事件。如果用户在规定时间内未响应任务,流程应转向备用路径(例如升级或自动取消)。这可以防止流程无限期等待。
4. 变量验证
确保在网关之前,条件表达式中使用的所有变量都已初始化。空值可能导致条件判断错误。应在流程开始时或数据创建时设置默认值逻辑。
🔍 调试与测试
即使设计得非常谨慎,由于复杂的运行时条件,死锁仍可能发生。测试是最后的防线。请按照以下步骤验证你的流程模型。
- 追踪令牌流: 使用模拟工具观察令牌在图中移动。查找那些意外停止移动的令牌。
- 检查事件子流程: 确保中断事件不会在其他并行任务仍在运行时取消主流程。
- 审查错误处理: 验证错误边界是否已附加到可能失败的任务上。如果任务失败且没有边界,令牌将丢失。
- 验证数据上下文: 确保在任务之间传递的数据足以满足下游条件。
常见陷阱检查清单
- 每个AND网关是否都有对应的分支?
- 所有XOR网关是否都使用了默认流?
- 事件子流程是否中断了正确的流程?
- 外部等待是否有超时设置?
- 变量名称在图中是否保持一致?
🔄 高级场景:消息流
当流程涉及外部系统时,消息流会引入额外的复杂性。与顺序流不同,消息流表示池或参与者之间的通信。如果发送了消息但从未被接收,或者接收流程期望的消息从未被触发,就可能发生死锁。
为缓解此问题:
- 使用中间消息事件: 这些明确标记了流程等待响应的位置。
- 实施补偿机制: 如果消息事务失败,定义一个补偿活动来撤销之前的操作。
- 关联键: 确保消息关联键具有唯一性,并正确映射到流程变量。
📝 最终总结
设计一个避免死锁的BPMN模型,需要关注网关、令牌和数据流的细节。通过理解AND网关的同步要求,并确保条件逻辑涵盖所有可能的状态,可以创建具有韧性的流程。定期测试和模拟对于在问题影响生产环境之前发现它们至关重要。专注于显式同步和默认路径,以保持对流程生命周期的控制。
采用这些实践可确保您的流程设计保持高效和可靠。持续审查流程日志也有助于识别由实际数据变化引发的潜在死锁,而这些变化在初始建模阶段并不存在。

